项目背景
2024年大学生电子设计大赛是省赛,也就是没有国家赛可以参加,赛制也有稍微不同,从之前的5天变成了7天。
控制题赛道题目 | 自动行驶小车(H 题)
一、任务
设计一个采用 TI MSPM0 系列 MCU 控制的自动行驶小车,能在指定路径上自动行驶,行驶场地示意如图 1 所示。 场地面积不小于 220cm×120cm。 图中两个对称半圆弧线的半径为 40cm,弧线为黑色,线宽 1.8cm 左右,弧线的四个顶点分别定义为A、B、C 和D 点。建议场地采用白色哑光喷绘布制作。 场地除两个半圆弧外,不得添加任何标记。

二、要求
-
将小车放在位置 A 点,小车能自动行驶到 B 点停车,停车时有声光提示。用时不大于15 秒。(20 分)
-
将小车放在位置 A 点,小车能自动行驶到 B 点后,沿半弧线行驶到 C点,再由C 点自动行驶到 D 点, 最后沿半弧线行驶到 A 点停车,经过一个点,声光提示一次。完成一圈用时不大于 30 秒。(20 分)
-
将小车放在位置 A 点,小车能自动行驶到 C 点后,沿半弧线行驶到 B点,再由B 点自动行驶到 D 点, 最后沿半弧线行驶到 A 点停车。经过一个点,声光提示一次。完成一圈用时不大于 40 秒。(30 分)
-
按要求 3 的路径自动行驶4 圈停车,用时越少越好(30 分)
-
设计报告。 (20 分)
三、说明
-
作品中的小车尺寸不大于 25cm(长)×15cm(宽)× 15cm(高)。小车尺寸包括小车以及小车所安装的传感器等总体的轮廓尺寸大小。小车采用轮式小车,不得采用履带和麦氏轮。小车行驶时只能前进,不得后退。必须采用TI MSPM0 系列 MCU 控制小车的状态,不得采用其他型号的 MCU。小车控制板安装时需暴露其 TI MSPM0 芯片,便于测试时查验。小车上不得安装摄像头。不符合规定的小车不进行测试。
-
行驶场地水平铺设于平整的地面,除题目要求的圆弧之外,行驶场地上不得有其他任何指示标记(包括 ABCD 四个字符)。不得对测试场地外环境有任何要求。为了适应测试场地,允许测试前小车试跑。3. 小车不得借助周围环境物品导航。场地内外不得架设任何其他装置设备。正式测试时,小车行驶过程中不得人为干涉、遥控小车运动。测试时,应允许相关人员在场地外围走动。
-
本题目所有小车在起始点的摆放方向自定。要求的小车停车动作及行驶经过A、B、C、D 点时,必须有声光提示。启动、停车及行驶经过 A、B、C、D 点时,小车的地面投影必须覆盖圆弧顶点;小车所有在圆弧上的行驶过程,其投影必须在弧线上,投影脱离圆弧即认为此次测试失败,此项目不得分。
-
所有测试项目如果完成时间超过规定时间一倍以上时,此项目不得分。
-
小车采用车载电池供电。进入测试环节,中途不得更换电池。
四、评分标准
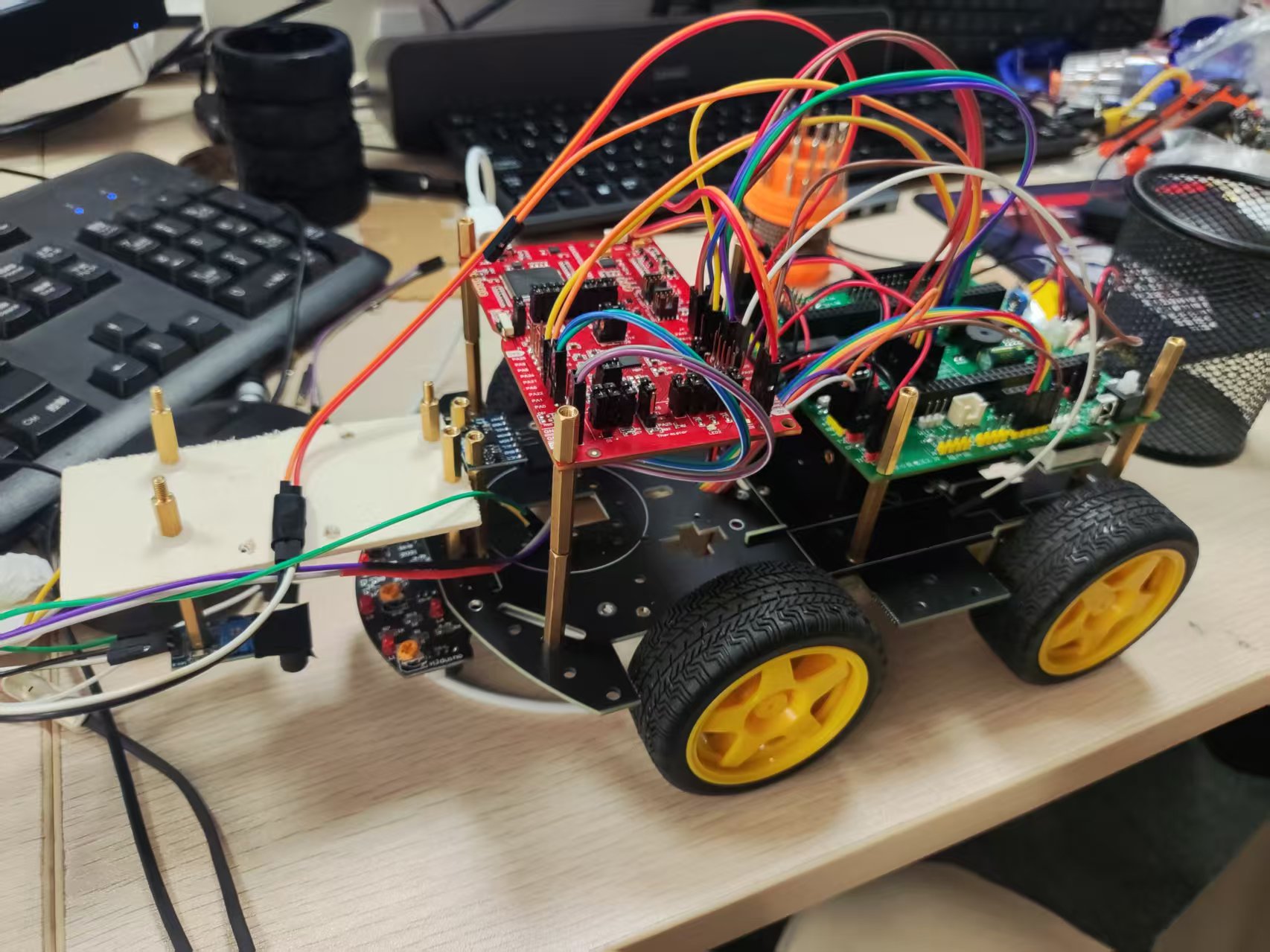
项目开发
硬件设计
我们的开发思路是,配合一个六路方向传感器用于确定方向、一个红外传感器用于循迹。

控制系统设计
根据方向控制小车左右轮的转速差,从而实现转向控制。
难点: 在左(右)转的状态下时,“左调整”、“直行”、“右调整”的实现和直行时是不一样的,需要不断调试。
程序设计
难点: 题目要求用 TI MSPM0 系列 MCU,需要花大量时间去查看英文文档,配置开发环境。
在环境调试完成后,开发的过程就和普通的单片机开发类似了,主要是完成传感器数据读取、底盘控制以及控制逻辑设计。