Project Background
The 2024 University Student Electronic Design Competition is a provincial competition, meaning there is no national competition to participate in. The competition format has also changed slightly, extending from the previous 5 days to 7 days.
Control Topic | Automatic Driving Small Car (Topic H)
1. Task
Design an automatic driving small car controlled by the TI MSPM0 series MCU, capable of automatically driving on a specified path. The driving field is illustrated in Figure 1. The field area is not less than 220cm×120cm. The two symmetrical semicircular arcs in the figure have a radius of 40cm, the arcs are black, with a line width of about 1.8cm, and the four vertices of the arcs are defined as points A, B, C, and D respectively. It is recommended that the field be made of white matte spray cloth. No other markings are allowed on the field except for the two semicircular arcs.

2. Requirements
-
Place the small car at point A, and the car should automatically drive to point B and stop, with audio-visual prompts upon stopping. The time taken should not exceed 15 seconds. (20 points)
-
Place the small car at point A, and the car should automatically drive to point B, then drive along the semicircular arc to point C, then automatically drive from point C to point D, and finally drive along the semicircular arc to point A and stop, with audio-visual prompts upon passing each point. The time taken to complete one lap should not exceed 30 seconds. (20 points)
-
Place the small car at point A, and the car should automatically drive to point C, then drive along the semicircular arc to point B, then automatically drive from point B to point D, and finally drive along the semicircular arc to point A and stop, with audio-visual prompts upon passing each point. The time taken to complete one lap should not exceed 40 seconds. (30 points)
-
Automatically drive 4 laps along the path specified in requirement 3 and stop, with the goal of minimizing the time taken. (30 points)
-
Design report. (20 points)
3. Notes
-
The dimensions of the small car in the work should not exceed 25cm (length) × 15cm (width) × 15cm (height). The car size includes the overall outline size of the car and the sensors installed on the car. The car should be a wheeled car, and tracks and Mecanum wheels are not allowed. The car can only move forward and cannot move backward. The car must be controlled by the TI MSPM0 series MCU, and other MCU models are not allowed. The TI MSPM0 chip on the car control board must be exposed for inspection during testing. Cameras are not allowed on the car. Cars that do not meet the requirements will not be tested.
-
The driving field should be laid flat on a level surface. Except for the semicircular arcs required by the topic, no other markings (including the characters A, B, C, and D) are allowed on the driving field. No requirements are imposed on the environment outside the test field. To adapt to the test field, test runs of the small car are allowed before testing. 3. The small car must not use surrounding environmental objects for navigation. No other devices or equipment are allowed to be set up inside or outside the field. During formal testing, the small car must not be interfered with or remotely controlled. During testing, relevant personnel are allowed to walk around the perimeter of the field.
-
The initial placement direction of all small cars at the starting point is arbitrary. The required parking action of the small car and the passing of points A, B, C, and D must have audio-visual prompts. When starting, stopping, and passing points A, B, C, and D, the ground projection of the small car must cover the arc vertices; during all driving processes on the arc, its projection must be on the arc line. If the projection leaves the arc, the test is considered failed, and this item will not be scored.
-
If the completion time of all test items exceeds twice the specified time, this item will not be scored.
-
The small car is powered by an onboard battery. During the testing phase, the battery must not be replaced.
4. Scoring Criteria
Project Development
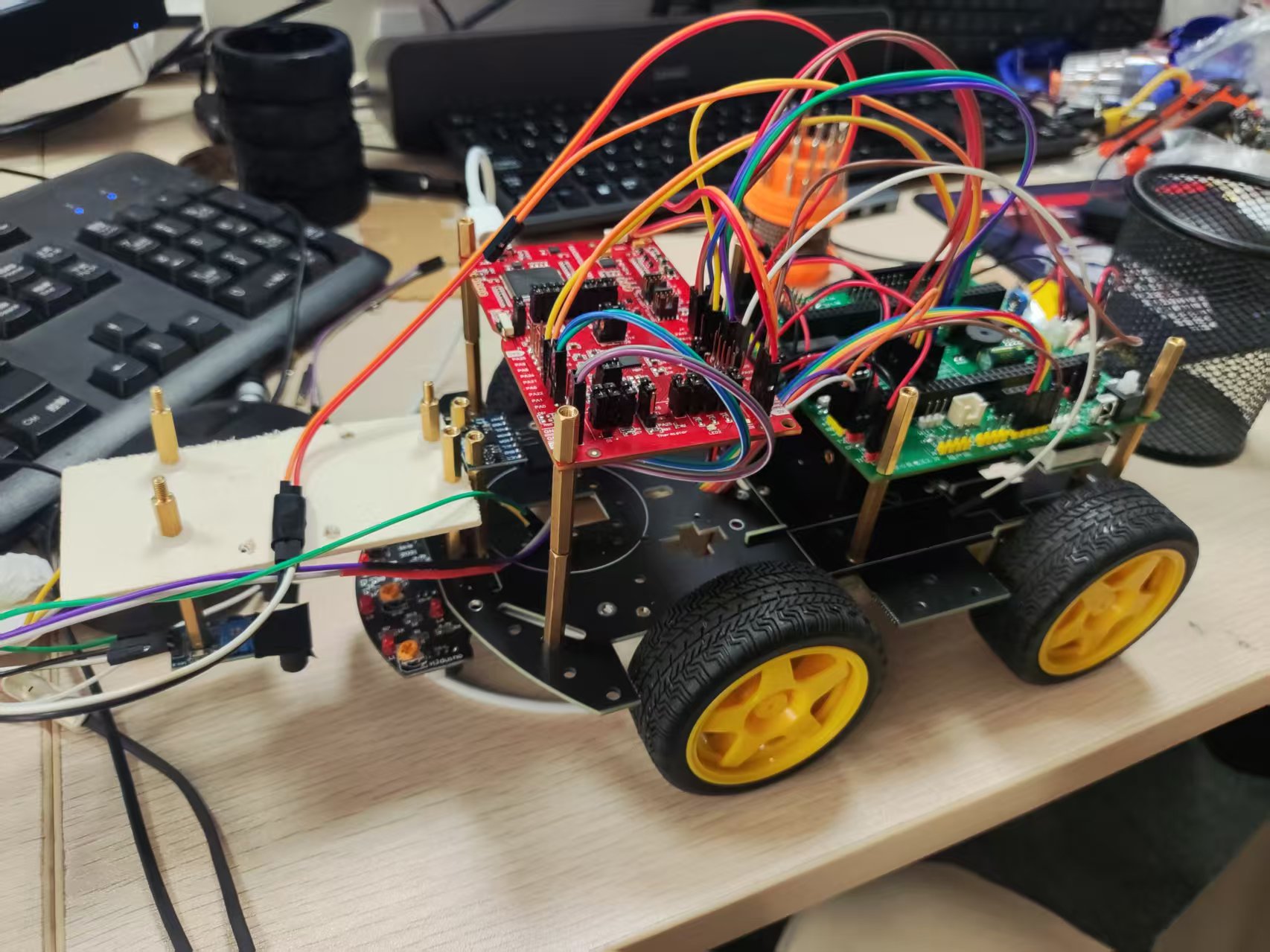
Hardware Design
Our development approach involves using a six-way directional sensor to determine direction and an infrared sensor for line tracking.

Control System Design
The direction is controlled by adjusting the speed difference between the left and right wheels of the small car to achieve steering control.
Challenge: When turning left (right), the implementation of “left adjustment,” “straight,” and “right adjustment” is different from when driving straight, requiring continuous debugging.
Program Design
Challenge: The project requires using the TI MSPM0 series MCU, which necessitated spending a significant amount of time reviewing English documentation and configuring the development environment.
Once the environment was set up, the development process was similar to that of a typical microcontroller, mainly involving sensor data acquisition, chassis control, and control logic design.